
百年沧海桑田,见证了科技的日新月异。随着工业化进程的推进,机器人的研发和应用也进入了快速地发展的阶段。长期从事机器人视觉与自主作业研究的范俊峰,以“海洋强国” 和“制造强国” 战略需求为目标,加强科学技术创新,推动机器人的研发与应用。

机器人是世界公认的核心竞争力之一。它融合了机械、传感器、无线通信、和人工智能等诸多先进的技术,是世界强国重点发展的高科技,中国的机器人发展也被视为未来发展战略。
在国家层面,工信部等十七部门联合发布《“机器人+”应用行动实施方案》中也提出了到2025年,制造业机器人密度较2020年实现翻番,服务机器人、特种机器人行业应用深度和广度明显提升的发展目标。同时,这也宣告着,中国的机器人研发,进入了快速地发展的轨道。
作为新时代的青年,范俊峰肩负使命,敢闯敢当,不负韶华,用知识和眼界拥抱机器人时代的到来。
在他看来,机器人不但可以提高生产效率和质量,还能代替人工从事高风险工作,所以,机器人的研发,势在必行。
身为中国科学院自动化研究所年轻的副研究员,硕士生导师,范俊峰有着极其闪耀的个人“名片”,主要研究方向为机器人视觉与自主作业的他,已经在国际知名期刊上发表 SCI 学术论文40 余篇,以第一作者或通讯作者身份发表 JCR Q1 区 SCI 期刊论文 20 余篇(14 篇 IEEE Trans.),获授权国家发明专利 20余项,并入选第七届中国科协青年人才托举工程、中科院特聘研究骨干、中科院青促会会员等。

(a) 中国科协青年托举 (b) 中科院青促会会员 (c) 北京科协青年托举
时间见证成长,卓越书写青春,新时代的奋斗,由新时代的奋斗者来定义。范俊峰就是这样一位定义奋斗,诠释奋斗的开拓者。
从水下机器人精细化三维感知与自主探索、焊接机器人三维感知与自主作业到FAST(中国天眼)靶标三维感知与自主装配,在范俊峰的字典里,“没有自主,就要受制于人。”所以,他将自主的力量发挥到了极致。而这份极致,需要更多成熟、创新技术的支撑。
针对弱光照浑浊水下环境精细化三维感知的需求,设计研制了具有自主知识产权的水下自扫描结构光视觉系统,建立考虑折射的水下视觉测量模型,完成水下目标精细化三维重建,水下重建精度达到毫米级。
针对水下机器人运动中准确三维感知的需求,提出了一个水下可移动高精度稠密重建框架。首先提出了一种结合IMU和匀速模型的新型水下运动补偿算法,然后引入GICP点云匹配算法,不依赖外部水下多普勒速度仪等传感信息,就可以实现水下移动中高精度稠密重建。
针对水下机器人未知环境下自主探索的需求,提出了一个水下机器人无碰撞导航方法,融合水下结构光视觉、多普勒速度仪(DVL)、惯性测量单元(IMU)和压力传感器等多模态信息,实现黑暗水下环境中自主无碰撞导航和稠密建图。
作为核心骨干人员,先后研制了两代水下机器人平台,具备高机动、长航程、强智能等特点,长期驻扎在一线试验外场,参与完成东江湖及南海等地的多次湖试及海试试验。

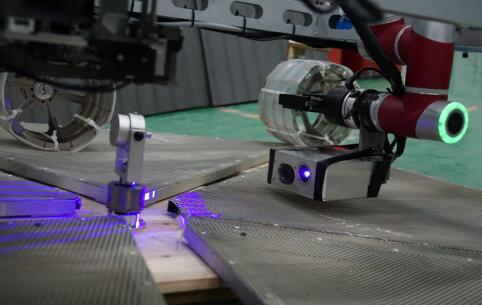
针对微细焊缝初始点导引与跟踪的需求,设计研制了双源结构光视觉传感器,提出了微细焊缝特征点提取算法,并设计控制管理系统实现空间微细焊缝初始点对准以及水平和竖直方向上的焊缝跟踪,跟踪精度为亚毫米级。
针对传统基于几何特征的焊缝特征点提取方法存在的灵活性、鲁棒性差的缺点,提出了一种基于高效卷积算子和粒子滤波的焊缝特征点提取方法,该方法适用于不一样的焊缝,即使在焊接强噪声的干扰下,也能快速准确地提取得到焊缝特征点。
提出了一种基于深度神经网络的复杂空间焊缝跟踪和姿态调整方法,利用深度神经网络获取焊缝特征点,基于最近邻算法和三次B样条曲线拟合算法,建立了复杂空间焊缝的位置和姿态模型,实现了复杂空间焊缝的机器人焊接姿态调整和高精度焊缝跟踪。
面向制造强国的战略需求,作为项目负责人范俊峰研发了基于激光结构光视觉的焊缝识别与跟踪系统,具备焊缝提取、焊缝寻位、焊缝扫描和焊缝跟踪等功能,适用于对接、搭接、角接、微细等多种焊缝类型,有效解决了焊接机器人自动化及智能化水平低、难以实现自主焊接作业等实际问题,该成果在山东能源集团(世界五百强)机器人智能化焊接生产线上得到批量应用。

针对FAST靶标等高反光物体三维测量的需求,提出了一种基于区域自适应条纹亮度的高动态范围结构光三维测量方法。首先建立自适应最优亮度投影模型;然后通过链码和M估计样本一致性方法确定局部单应性关系,生成自适应亮度条纹图像;最后结合投影仪和相机标定结果准确获取高反光靶标的三维点云。
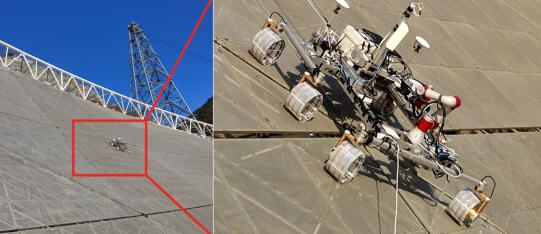
针对狭窄拥挤的空间FAST靶标自主旋拧的需求,设计了一种具备侧边旋拧和力矩抵消的靶标作动器,最重要的包含侧面旋拧装置、消除力矩的夹紧装置、调整旋拧高度的调节装置等,试验表明研制的靶标作动器可以从侧面任意方向接近靶标,并完成旋拧。
提出了受限空间下多视角融合配准的靶标三维位姿测量方法和融合力位信息的柔性装配操控方法,作为核心骨干研制了具有自主知识产权的靶标维护机器人系统,并在FAST现场进行了作业应用验证,获得国家天文台应用证明。
在中华民族伟大复兴的进程中,青年是国家的脊梁,是中国梦实现的践行者。“作为年轻的探索者,我们有责任担起科技兴国的使命。”朴素的话语中,透漏出的坚定,却是毫不迟疑的。